科技日报记者 王禹涵 通讯员 王翠萍
第一次走进陌生场所,无需开展细粒度的建图,基于内在的空间地图并融合少量的环境信息就可以实现灵活导航——这种人类和动物与生俱来的能力,科学家称之为“空间智能”。如何让机器人也拥有这种本领,一直是全球具身智能领域的核心难题。
5月22日,西北工业大学人机物融合智能计算团队在这一方向上取得进展,其综述论文被《自然》子刊《自然综述:电气工程》录用。团队提出的“类脑认知导航”框架,试图让机器人像动物一样,在未知环境中理解空间、调用经验并做出灵活决策。
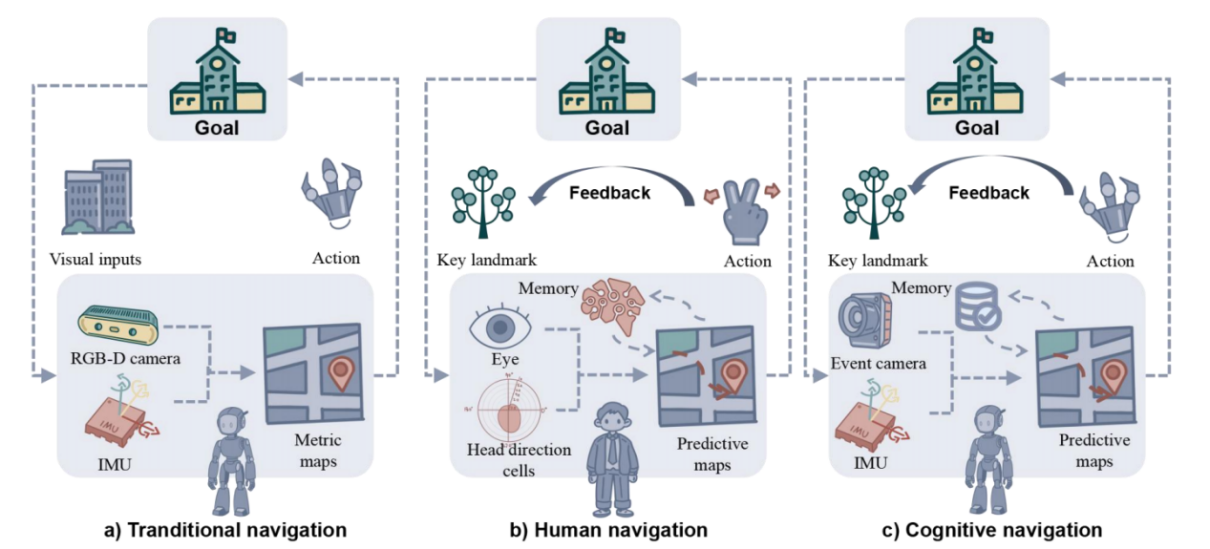
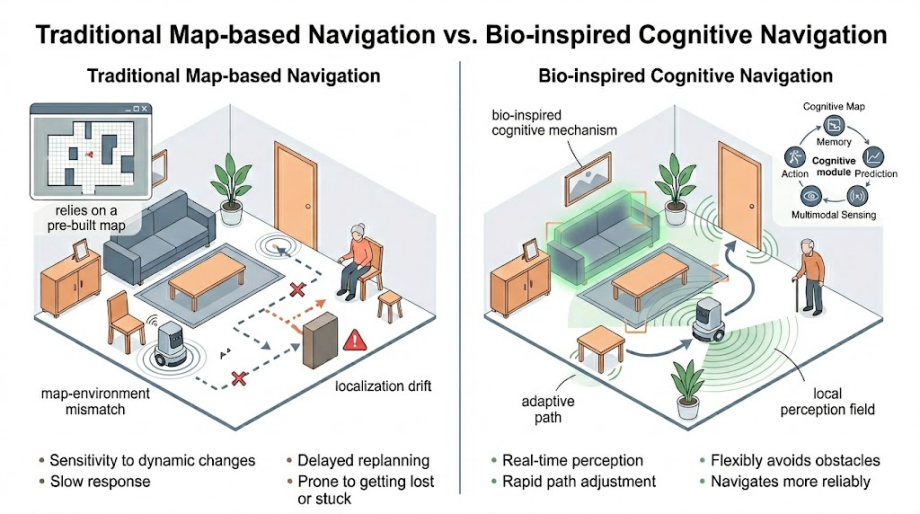
“现在的机器人看起来很聪明,其实很‘迷糊’。”西北工业大学计算机学院教授郭斌告诉记者。传统机器人导航遵循“建图—定位—规划—控制”的固定流程,就像一个人拿着纸质地图走路,地图上没有标的路就不会走。这种方式在仓库、工厂等结构化场景通过大数据训练尚能应付,而一旦环境和场景发生变化,机器人就会瞬间“失智”。“说到底就是泛化能力差。”郭斌说,“环境一变,它就不知道怎么走了。”
团队从动物身上寻找解决办法。郭斌以老鼠走迷宫为例向记者解释,老鼠不会记住每一个拐角,而是抓住几个关键地标,在大脑中形成记忆和抽象知识,构建“认知地图”,下次遇到类似环境,还能把旧经验和记忆拿过来用。
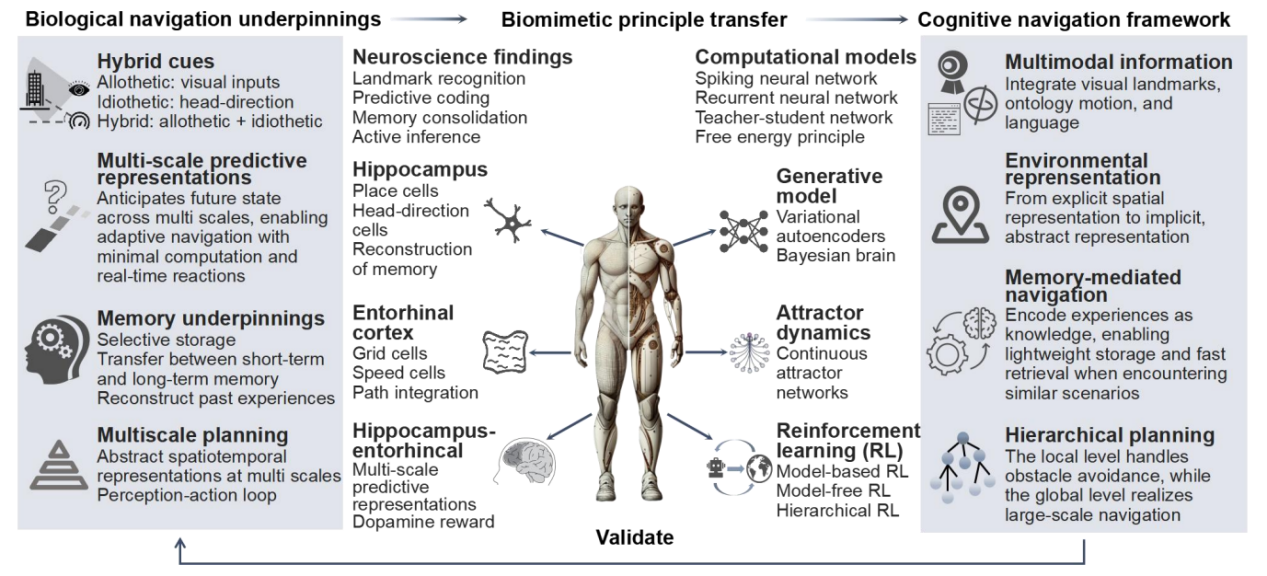
“动物会认路,靠的不是记性好,而是会总结、会联想、会活用。”郭斌解释道,基于这一思路,团队将动物认路过程中的地标识别、经验记忆和灵活决策能力逐一拆解,转化为低成本、高泛化的类人机器人导航框架。
这个框架包含四个关键环节:多模态融合感知,让机器人融合运动、姿态、环境信号,更精准地判断自己在空间中的状态;预测式表征,让机器人不仅知道“我在哪”,还能预判“前面会遇到什么”;记忆复用,把走过的路转化为分层抽象、可迁移的知识,到了陌生环境也能“举一反三”;分层规划,先确定大方向再细化具体路径,让机器人“带着思考走路”。郭斌告诉记者,这四项技术共同作用,使机器人从“被动执行”走向“主动思考”。
目前,团队正与多家单位开展技术转化及应用工作。郭斌介绍,老年健康陪伴、复杂环境作业、灾难应急救援等场景的共同特点是动态、未知、充满变数,它们一直是机器人技术落地的“最后一公里”难题。“类脑认知导航”框架赋予了机器人在未知与动态环境中自主感知、决策与行动的能力。“更多地向人类和动物汲取智慧,将使得机器人真正具备走进复杂真实世界的潜力。”郭斌说。
 网友评论
网友评论