科技日报记者 滕继濮 实习记者 夏天一 通讯员 于乐
9月25日,记者从江南大学获悉,该校纺织科学与工程学院孙丰鑫团队提出了一种基于纺织结构超表面编织的多功能变形与拟态伪装软体机器人设计策略。相关成果日前发表在国际期刊《先进纤维材料》上。
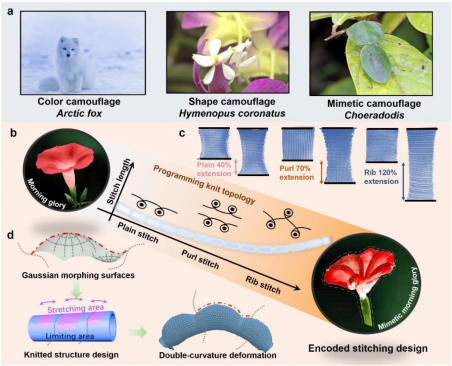
孙丰鑫介绍,柔软生物组织系统的可逆形变,使其具备连续运动、灵巧操控与自适应伪装的能力。然而,利用人工合成材料复制这一技能,却没有想象中简单。
研究团队利用纺织学中的“线圈针脚编程”方法,通过调整纱线线圈的几何排列,实现针织结构的精准工程化设计。团队仅依靠结构设计,无需更换材料,即可赋予织物不同的弹性和形变模式,从而精准控制软体机器人的“变身”过程,显著提升软体机器人的力学控制精度、设计灵活性与环境适应性。
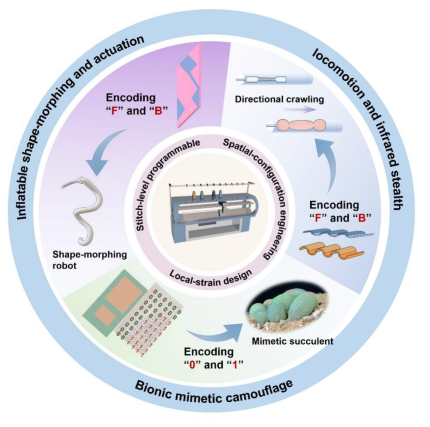
该团队基于这一原理,研制出具备可调刚度与弹性的柔性针织机器人,能够完成复杂曲面变形,并展示了可多模式变形机器人、流体驱动的红外隐身柔性爬行机器人,以及仿生拟态伪装系统等多种应用原型。
这一成果将为多形态与伪装软体机器人研发开辟低成本、可扩展与定制化的新路径,未来有望应用于个性化可穿戴设备、自适应伪装迷彩、人机交互以及智能温控服装等领域。
(受访者供图)
 网友评论
网友评论