

科技日报记者 江耘
外科手术中伤口缝合的打结是项精细活。结打松了,难以有效止血;结打紧了,容易断线或损坏器官组织。中国科学院院士、浙江大学航空航天学院交叉力学中心主任杨卫团队和中国科学院院士、浙江大学医学院附属邵逸夫医院院长蔡秀军团队,历时三年开展交叉研究,阐明了“基于活结的力学传导机制”,并创新性研发出“Sliputure(活结智能缝线)”,成功将其应用于外科缝合,解决了机器人手术“力盲”缺陷。此项研究于北京时间11月27日以封面文章的形式登上国际学术期刊《自然》。
外科手术中闭合组织时需要缝合打结,即“外科结”。“外科结”普遍是死结,一旦打牢很难调整。因此,“外科结”非常依赖医生的精巧施力。
如今,中国外科手术逐步从大开大合向精准微创迭代。“技术在进步,但外科医生的打结手感却在不断消失。”文章通讯作者、浙江大学医学院附属邵逸夫医院陈鸣宇医师介绍,在传统开放手术中,医生的双手能直接感知组织软硬,精准掌控缝合力度,但代价是患者创伤大、恢复慢;而机器人微创手术能获得高清视野和强稳定性的优势同时,医生直接的力反馈大大减弱,在手术台上陷入“力盲”困境。
在此前两个团队的头脑风暴中,陈鸣宇提出手术感知力反馈缺失的痛点。“那就在旁边先打个活结,以活结控死结。”文章通讯作者、浙江大学航空航天学院交叉力学中心研究员杨栩旭灵光一现,脱口而出一个既传统又科学的想法。
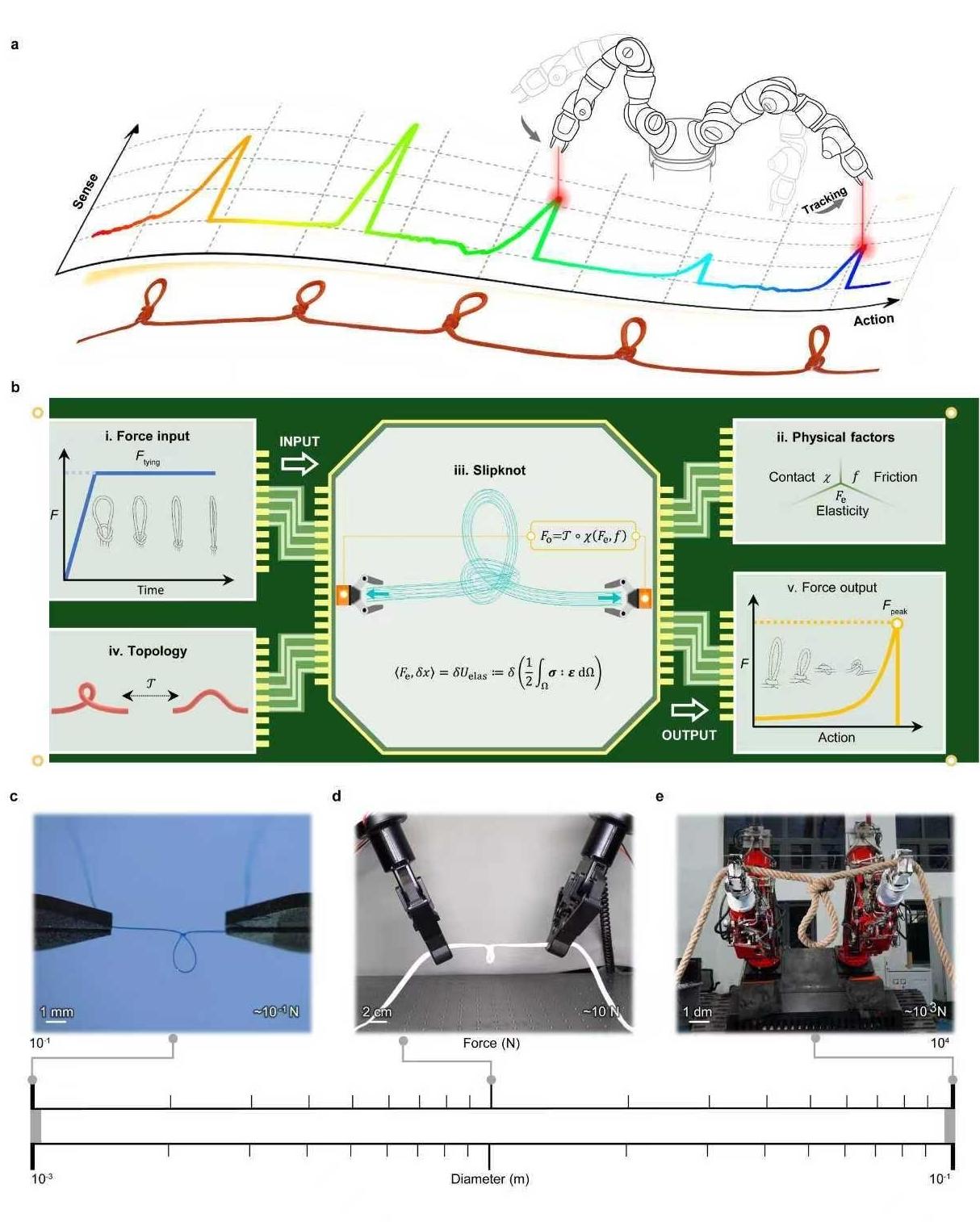
“想象一下,当医生拉紧缝线时,活结的结点被解开瞬间所产生的、一个预设好的精准峰值力,会通过这根缝线实时传送给另一头的死结。活结打开的这一刻就是告诉医生:‘力度已到位,死结请锁定!’”杨栩旭说道。
天马行空般“以活结控死结”的灵感,能否成为手术台上稳定可靠的应用,技术难题在于:如何确保每一个活结都能稳定在预设的、唯一的、精准的力度下打开。
团队通过高速摄像和Micro-CT捕捉活结细微的滑动轨迹,通过力学建模、有限元仿真等手段发现了活结蕴藏的有序规律:其打开力与缝线编活结时拉紧结点的预紧力、结环数量、直径等因素相关。
实验显示,针对特定的活结,解开它们最后那一瞬间的峰值力高度一致。
历经上千次设计迭代,团队完成了“基于活结的力学传导机制”的程序,并最终成功将这一力学“密码”稳定地“编织”进外科缝线中,研发出Sliputure。
文章通讯作者、浙江大学航空航天学院交叉力学中心教授李铁风介绍,Sliputure将力学智能融入外科缝线,其核心在于:给活结预设的打开力,刚好等于缝合某一组织时适宜打死结的力。
在动物肠道修复手术实验中,Sliputure的打结力度被精准控制,恰好保持肠道闭合不渗漏的同时,又不发生撕裂。从开放大鼠肠道修复,到腹腔镜下活体猪肠道修复,再到机器人下活体猪肠道修复等实验结果显示,Sliputure均让术后脏器血供与组织的愈合程度得到改善。
“这意味着,Sliputure不仅能在开放手术中使用,也能适配腹腔镜手术和机器人手术。”李铁风表示,机械臂搭载的自动识别与反馈系统检测到活结打开信号,立即停止“外科结”动作,实现“感知—反馈—制动”的闭环控制,将外科操作的力推进到“可量化”和“可感知”新纪元。
 网友评论
网友评论















