近日,西湖大学智能无人系统实验室的一项科研成果在全球首次攻克了两架无人机近距离叠飞的难题。并且,上面的飞机还能伸出操作手,抓取下面飞机搭载的工具,抓取的操作精度达到亚厘米。这也是中国的多旋翼无人机相关技术第一次登上科学期刊《自然》杂志,这两架叠着飞的无人机有何创新亮点,无人机和具身智能的结合又为我们打开了哪些想象空间?戳视频↓走进西湖大学实验室一探究竟。
上下叠飞的无人机 如何实现精准控制?
两架无人机其实就是两个空中机器人,要在空中规避强烈的气流干扰、实现这样的协同工作,着实不是一件容易的事,研发团队花了三年时间,要破解两个主要难题,第一是两架无人机靠近的时候如何飞得稳,第二是操作手无人机如何拿得稳。刚开始的时候,为了实现叠飞,团队频频经历了“炸机”的情况。
·气流补偿算法让无人机保持平衡 飞得稳
先来说飞得稳,关键是气流补偿算法,相当于给无人机装了“风感预警系统”。团队把空气动力学原理和实测数据融合成模型,提前植入工具箱无人机的大脑。它能实时测算上方气流的干扰强度,再通过调整6个旋翼的转速抵消影响——就像骑手在强风中微调车把,始终保持平衡。
·柔性电磁对接 让无人机稳稳吸住工具
再来说柔性电磁对接,它堪称无人机的“智能磁吸手”。工具箱无人机顶部装着四个带电磁铁的圆锥装置,就像迷你蹦床般用弹性系绳固定。当操作无人机发出信号,电磁铁立刻通电,哪怕对接时稍有偏移,弹性结构也能自动校准,稳稳吸住工具。实验中,这个“磁吸手”连细小的剪刀都能精准抓取,几乎从不会失手。
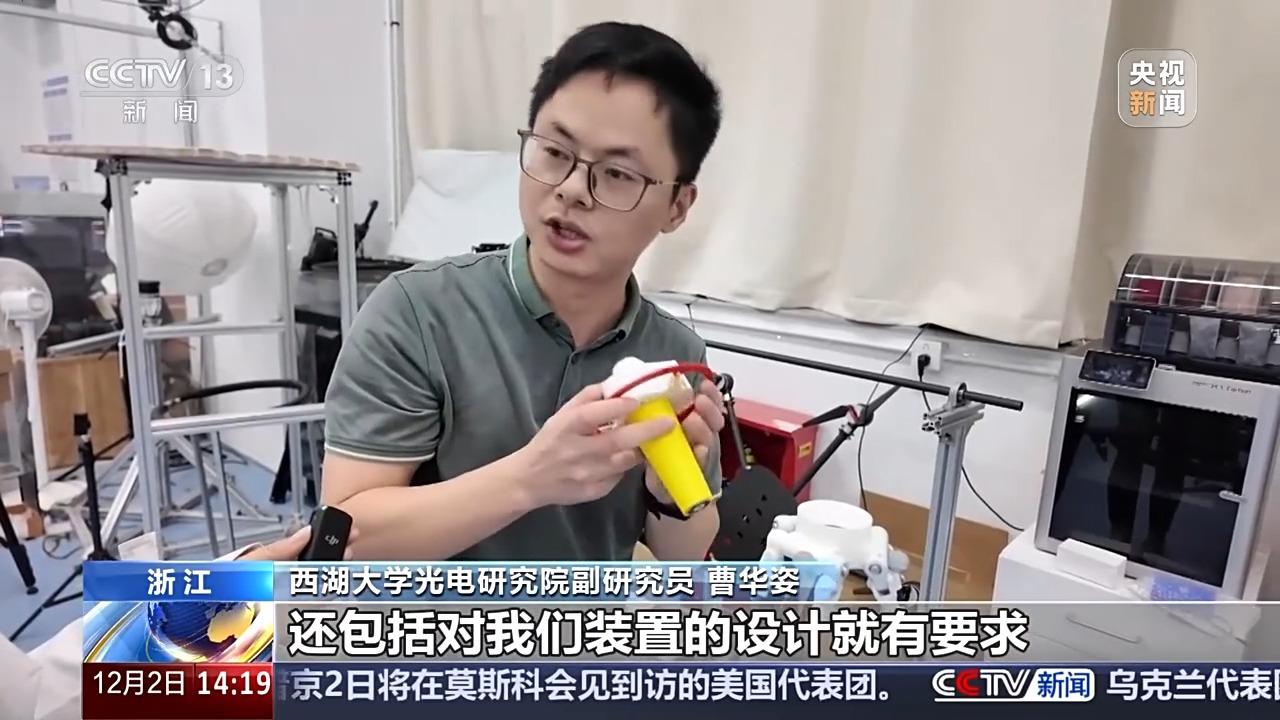
西湖大学光电研究院副研究员 曹华姿:一个是铁片,一个是电磁铁,要贴合上才能吸起来,对我们的精度,对我们装置的设计就有要求。有了柔顺性装置之后,它通过柔顺性自己就可以贴合起来。
·通过识别专属二维码 算出两者相对位置
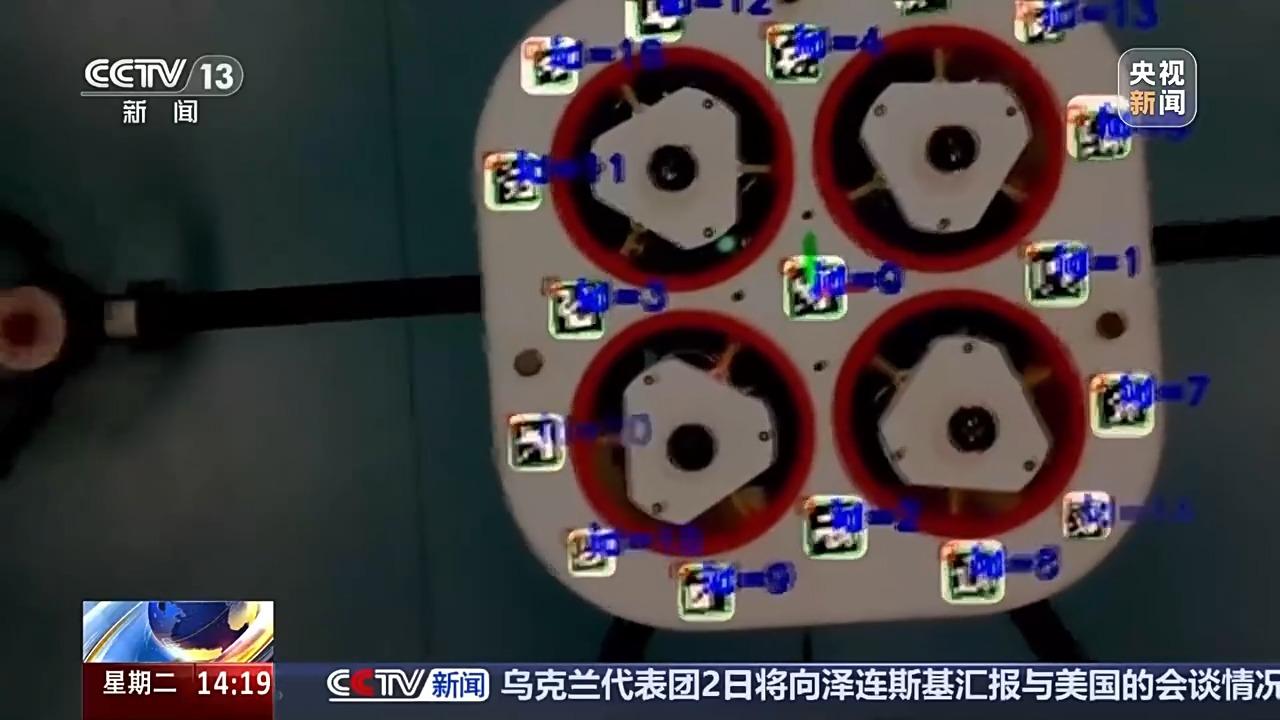
工具箱顶部贴着十多个专属二维码,操作无人机的相机只要识别到足够数量的二维码,就能瞬间算出两者的相对位置。这套“视觉+调速”的组合拳,把对接误差压缩到了0.8厘米,比此前的技术精度提升了近10倍。
西湖大学智能无人系统实验室负责人 赵世钰:因为我们无人机加上机械臂其实是新型的,非常有潜力的一种机器人的类型。我们更需要无人机有更亲密的合作,特别是载荷的交换,比如说从一个无人机上把工具拿起来,或者把工具给放回去,这种工具的交换其实是非常关键的。
无人机可在生活中带来更多应用场景
不光是两架无人机可以协同工作,再看看下面这些无人机的“花活儿”,能实现这些高难度的动作,其实意味着,它能在我们的生活中带来更多的应用场景。


西湖大学智能无人系统实验室博士生 季梦玉:机械臂对无人机有一个干扰,这样就会让它的无人机的位置和姿态有剧烈变化,反过来它对机械臂也有干扰,所以两个之间有强烈的耦合关系,这个力还是很大的。比如说我在森林防火或者扔急救包的时候,我可能需要比较大的初速度给它扔下去,扔到一个位置,或者是我在空中摘果实,把果实扔到对应的篮子里边。

·无人机可在生活中带来更多应用场景
得益于抗冲击算法,即便物品放偏了放歪了,这个小飞板也能很好地保持姿态和重心。你可能很难想象,一个小小的无人机,能够帮助我们干这么多事儿,而它们也只是一些简单的示范。想象一下,有一天能够保持平衡稳定的飞毯,能够在危险发生的时候保护人不受伤害,并且能悬停在空中,随时对受困人员进行营救,是不是有一种科幻大片的即视感。
大模型控制 无人车集群智能默契十足
看似“花拳绣腿”的背后,给未来无人机空中智能的进化带来了更多的想象空间。不仅如此,在大模型的控制下,多台无人设备还能够自主决策,涌现出集群智能的特点。
注意看,这些成群的无人设备,正在通过大模型控制,自主地完成编队等任务。如果其中一个无人设备掉队,或者出现问题,其他的会自动补齐。这些都是靠AI自主控制完成的。
西湖大学智能无人系统实验室负责人 赵世钰:我们的愿景是实现通用集群智能,这些机器人就能够自动地去帮我们做非常复杂的任务,能够实现这种人通过自然语言能够自然交互,并且在出现一些新的情况、新的任务的时候,整个系统能够丝滑地去进行切换,而不需要像之前那样非常僵硬的重新编程等。

这种分布式的集群智能,没有指挥中心,几十台、上百台无人机,靠“对话”和“感知”,就能像鱼群、鸟群、蚁群一样,自主通信、自主决策,协同完成复杂任务,涌现出高层的智能行为。
 网友评论
网友评论