科技日报记者 赵向南
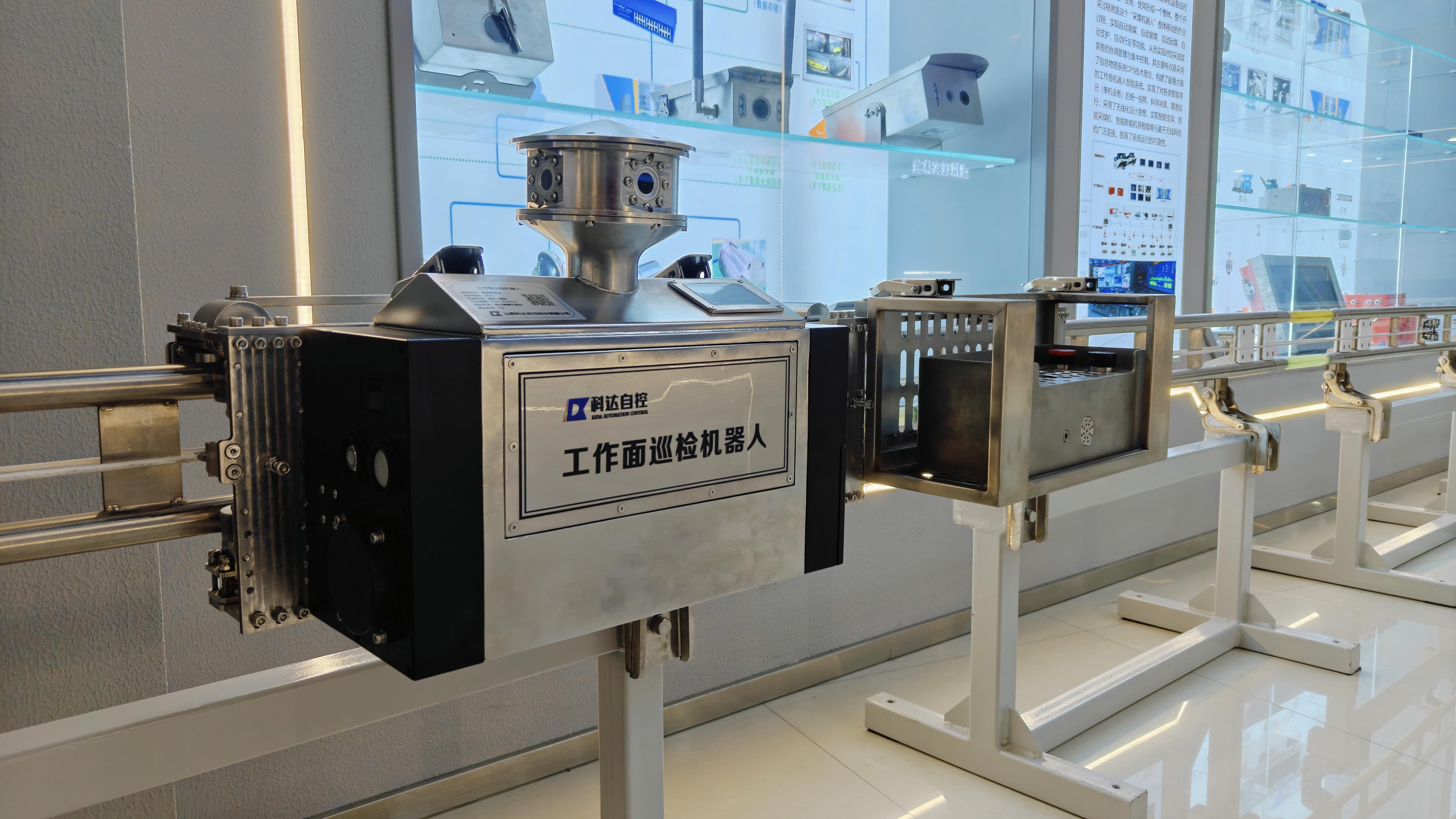
3月27日,记者从山西科达自控有限公司(以下简称“科达自控”)获悉,该公司机器人研发团队牵头研发的煤矿综采工作面牵引式巡检机器人(以下简称“牵引式巡检机器人”),精准攻克了煤矿综采工作面环境恶劣、空间狭小、人工巡检风险高等痛点,解决了常规巡检机器人面临驱动故障、监控受粉尘影响、无法常态化运行等行业难题,实现综采工作面智能、安全、连续巡检。该成果获得5项专利授权,并发表多篇专业论文。
煤炭是我国重要的一次能源,但煤矿综采工作面存在瓦斯爆炸、顶板灾害等多重安全隐患,且设备密集、交叉作业多,人工巡检不仅劳动强度大,还存在极大安全风险。为此,国家先后出台“机械化换人,自动化减人”等专项行动计划,将煤矿无人化开采列为重大工程,煤矿机器人研发成为行业发展关键。科达自控有关负责人说,国内综采工作面巡检机器人研究起步晚,多项成果仅实现简单视频巡检,无环境参数采集和数据分析模块,且因驱动方式不合理、粉尘影响监控效果等问题,始终无法常态化运行,成为煤炭智能开采的一大瓶颈和行业痛点。
科达自控组建专项研发团队,历经2年技术攻关,打造出这款牵引式巡检机器人。该机器人以双驱自适应牵引技术与工作面定姿定位为关键技术路线,创新设计自适应轨道,可适应刮板机在各方向的角度和错位变化,搭配轻量化本安型机器人本体,彻底解决了常规电池供电续航不足、有线供电负载过大的驱动难题,双驱设计更实现了故障冗余,一台驱动出现故障时另一台可继续工作,保障不间断巡检。

据介绍,这款牵引式巡检机器人在核心功能上,搭载可旋转红外与普通摄像集成仪、激光扫描仪、惯性导航仪等多种设备,还配备拾音、扬声模块实现对讲喊话,创新将惯性导航技术集成于机器人,为工作面自动调直提供精准数据,改变了传统在采煤机安装导航的方式。同时,该机器人集成多重传感器,具备完善的故障自检与自我保护机制,可检测驱动、传感器、通讯等各类故障。“这款牵引式巡检机器人已完成首台套样机研发并通过试验验证,成功实现综采工作面‘无人或少人跟机’作业,将巡检人员撤至安全的顺槽集控车内。”科达自控产品事业部总经理张志峰表示。
科达自控产品销售副总江月星介绍,这款牵引式巡检机器人的应用,可使煤矿综采工作面巡检人员由3人减至1人,还能减少10台摄像仪、2台环境传感器及1套惯性导航装置,同时降低设备维护成本、提升故障检修效率。科达自控技术总监贾华衷表示,该机器人有效解决了综采工作面巡检的行业痛点,大幅提高了煤矿综采自动化水平和本质安全水平,对推动煤炭行业智能化、无人化开采具有重要意义。
据悉,科达自控作为国家高新技术企业,牵头成立了(中国)智慧矿山协同创新联盟。该公司深耕智慧矿山领域30余年,坚持“能用、管用、好用”的理念,致力于为矿山“减人、增安、提效”提供落地、实用的全矿井智能化系统与产品。截至目前,公司已取得知识产权600多项,其中发明专利100余项。
(科达自控供图)
 网友评论
网友评论