科普时报记者 陈杰
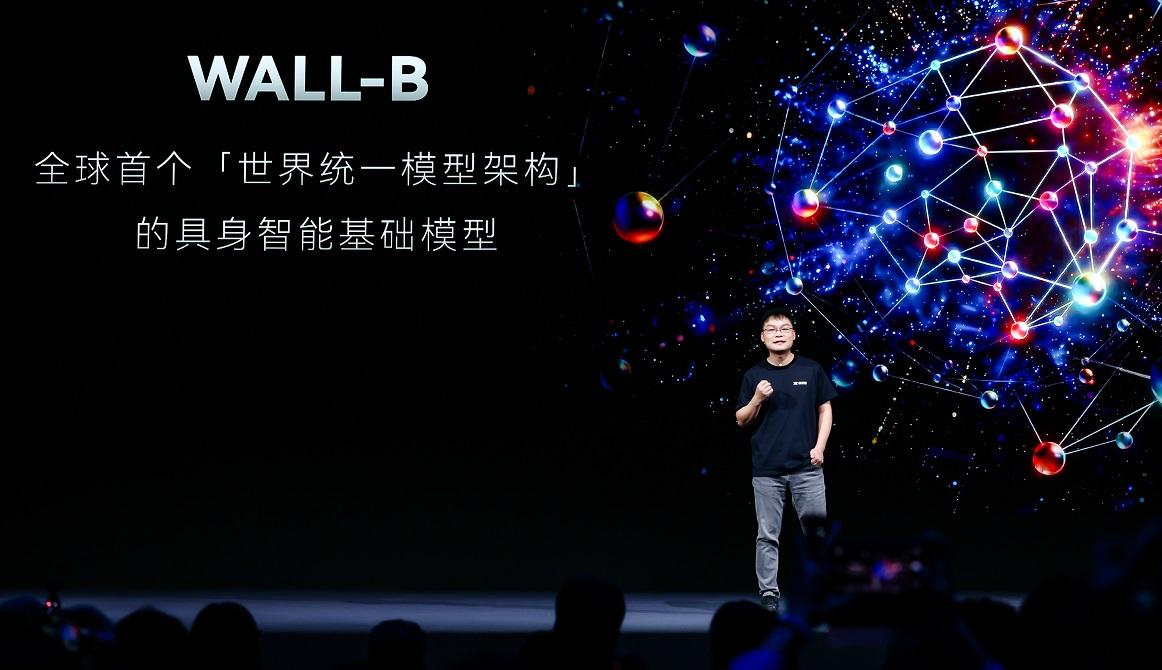
智能机器人的“炫技”表演早已司空见惯,但真正能检验其实用能力的,从来都是复杂多变的家庭场景。4月21日,自变量机器人发布新一代家用机器人计划,搭载自研具身智能基础模型WALL-B的机器人新品,将于一个月后首批进入真实家庭,在日常环境中自主学习成长,开启机器人服务家庭生活的新征程。
“早上七点,闹钟响了。你从床上爬起来,走到客厅。拖鞋不知踢到哪里,厨房的碗还没洗,孩子的书包扔在地上,猫还打翻了一杯水……”自变量创始人兼CEO王潜用日常生活片段,直观地说明了机器人在家庭环境中的痛点——随机、碎片化且时刻变化的场景,至今没有机器人能在无遥控状态下独立完成综合整理。
显然,这跟公众对机器人的普遍认知形成了明显反差——舞台上的机器人能后空翻、跳街舞、写书法,视觉效果绝对惊艳。“其实,这类机器人大多依靠预设轨迹与遥控操作,本质上仍是程序化执行的机器,无法应对家庭里千变万化的突发状况。”王潜说。
当前,机器人行业普遍存在硬件成熟、智能滞后的问题,双足、灵巧手、力控关节等硬件已足够完善,但机器人的“大脑”难以处理家庭场景的不确定性,进入家庭也成为当前行业最难攻克的技术难题之一。
据了解,WALL-B是全球首个基于世界统一模型WUM(World Unified Model)架构的具身智能基础模型,实现了具身基础模型从传统的VLA(感知-决策-执行)架构向原生多模态融合架构的关键跨越。
“这是一种架构层面的革新,能将视觉、语言、动作、物理预测等能力整合在同一网络中联合训练,彻底打破模块边界,减少数据搬运损耗。机器人可以在真实环境中自主迭代升级,无需工程师重新训练、人工投喂数据或返回实验室调试。”王潜打比方说,这就好比人类学习使用筷子的过程——筷子掉了无数次,但每一次失败都在调整手上的控制,机器人最终能形成稳定的技能,并通过类似人脑记忆的机制实现自我更新。
行业人士认为,现阶段进入家庭的机器人仍然不够灵活,行动缓慢且容易出错,但人类从婴儿时期迈出的第一步也是如此。在WUM模型的加持下,具身智能有望在烟火气中完成迭代进化,为家用机器人普及打下良好的基础。
(主办方供图)
 网友评论
网友评论