科技日报记者 刘侠 实习生 张紫莎
2月28日,由成都人形机器人创新中心(以下简称“中心”)自主研发的全球首个全尺寸重载双轮足机器人开源平台正式发布,标志着成都在人形机器人和具身智能关键技术与开源生态建设上取得了里程碑式突破。
记者了解到,人形机器人与具身智能产业正处于从实验室走向广阔应用的关键阶段。本次发布的开源平台,包含了从整机设计、核心控制系统到关键算法的全套技术资料,全球所有开发者、高校实验室或科创团队,都可以通过该平台免费获取这款双轮足机器人的全部关键技术资产。
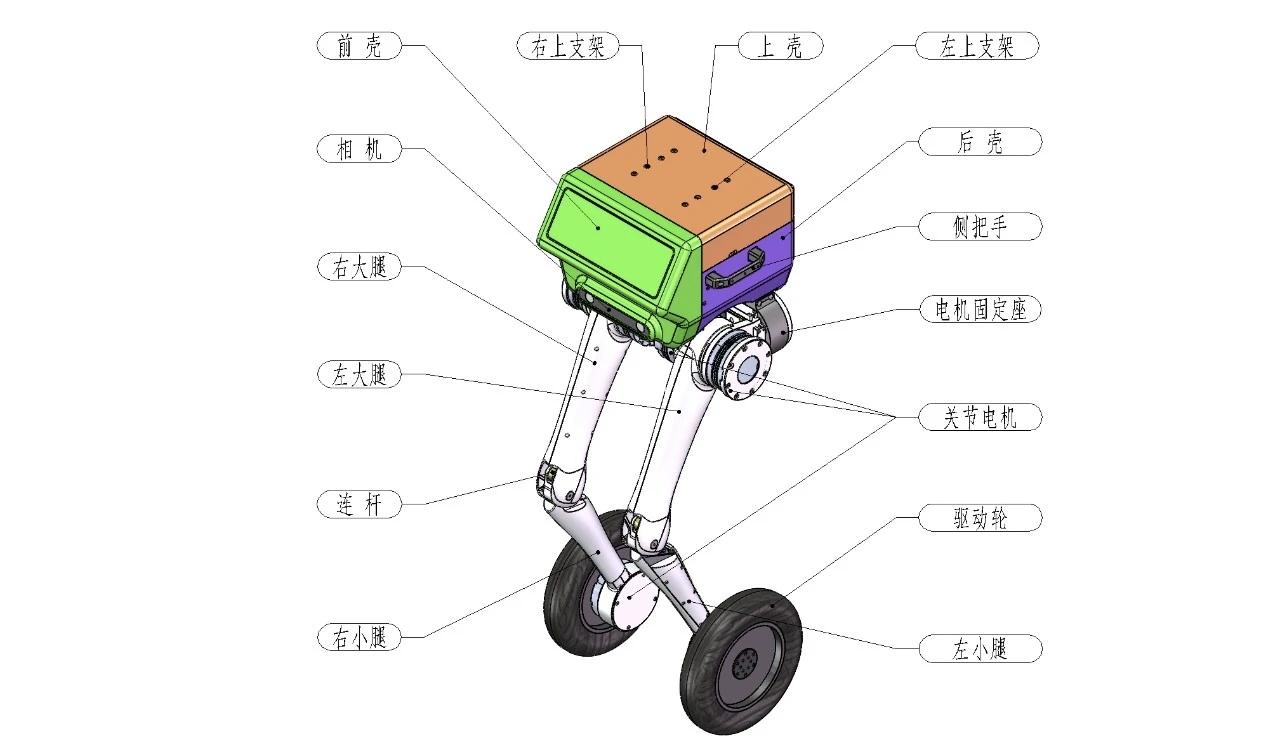
“这不是一次简单的代码分享,更是一套从图纸到算法的完整开发套装。”中心相关负责人介绍,公开包括整机三维结构模型、硬件系统框图、详细物料清单(BOM)及硬件功能教程在内的全套设计资料,方便开发者进行定制化修改及二次开发。在软件全开源方面,开放本机开发的底层源代码,如机器人MJCF模型文件、基于LQR的控制器代码等。
值得一提的是,此次开源的机器人平台,专为复杂环境下的重载移动与灵活作业设计,该机器人本体高1.1米、整机重21公斤,具备重载、敏捷、全天候三大核心性能优势。其负载能力达10公斤,负重比近0.5,远超同类轮式机器人;轮足复合的创新型设计,兼顾轮式高速移动与足式复杂越障能力,可轻松应对台阶、坡道、松软地面等多种地形。
此外,通过开源社区的广泛测试与应用反馈,持续迭代优化,推动形成领域内认可的硬件接口与软件协议标准,提升成都在全国乃至全球人形机器人与具身智能产业中的影响力与话语权。同时,吸引全球顶尖人才与项目,汇聚人工智能、算法、机械、电子等领域的智慧,在成都形成人形机器人与具身智能创新的强大“磁场效应”。
据悉,中心此次开源全球首个全尺寸重载双轮足机器人平台,是一次汇聚全球智慧、共建产业生态的战略性举措。此次发布,不仅是一个技术产品的开源,更是一个面向全球开发者的创新平台的建立。它标志着成都正式开启了构建全球人形机器人与具身智能开发者生态的先河,这一举措也为成都打造全球人形机器人与具身智能开发者生态高地奠定了坚实的基础。
 网友评论
网友评论