科技日报记者 张佳欣
据最新发表在《光学快报》杂志上的论文,日本庆应义塾大学研究团队研发出一种柔性光学触觉传感器,能够同时检测压力的位置和强度,且具备高灵敏度与稳定性,响应时间快至33毫秒。这一成果有望应用在新一代机器人触觉接口、先进医疗诊断,以及响应更快的可穿戴电子设备上。
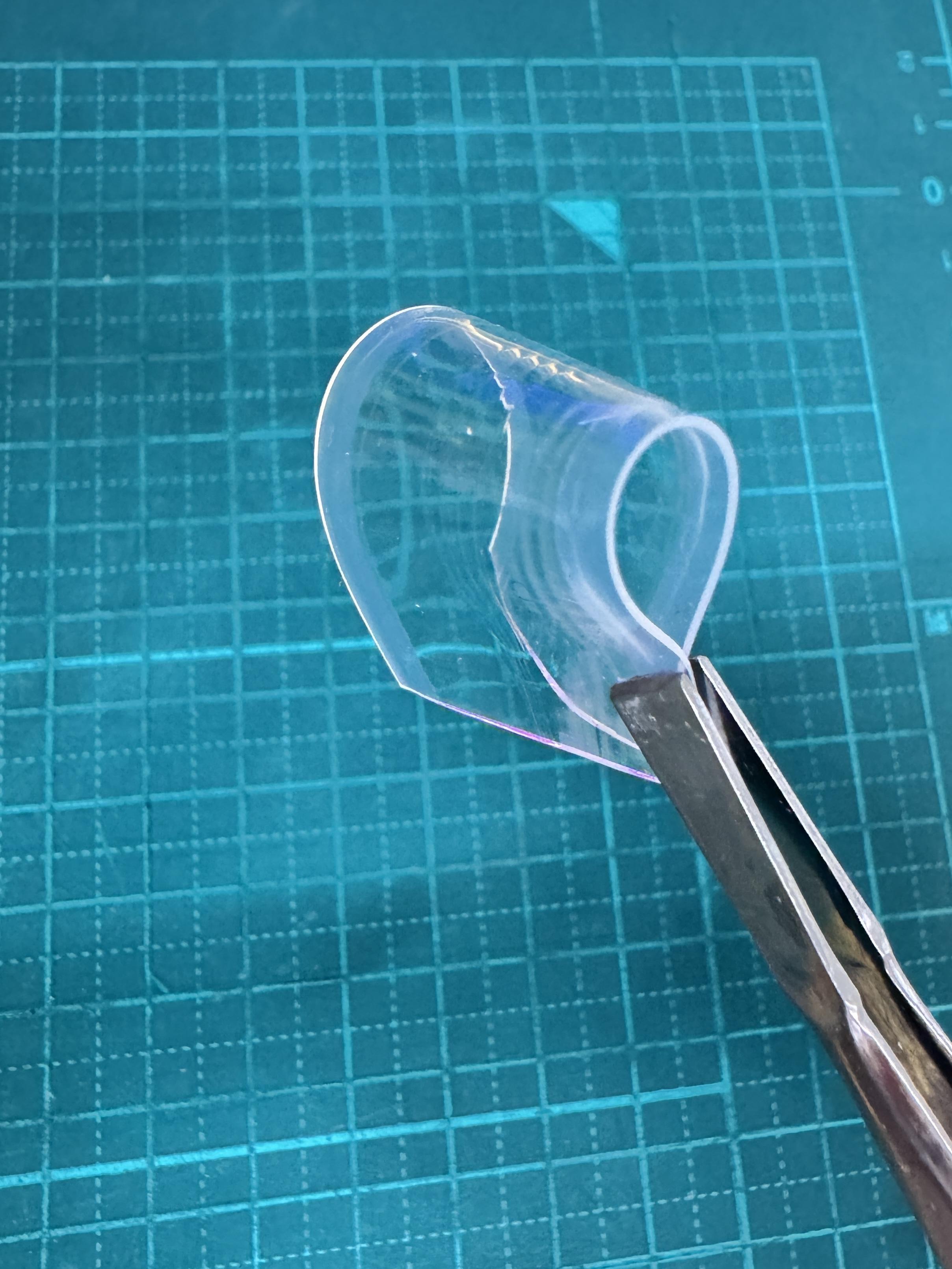
此次团队制造出一款长5厘米、宽1.5厘米、厚度仅500微米的四通道光学触觉传感器,其能以约1.5毫米的空间分辨率精确定位压力点。它的多光学通道设计,使其能在多个位置感知压力,并具备良好的可扩展性。
以往已有研究尝试将商用玻璃光纤嵌入聚合物片材来实现触觉传感,但这类设计往往只有单一路径,若要实现多通道配置,就必须依赖复杂的刚性布线。现在,团队采用了自主开发的一种制造聚合物光波导的方法。这种方法被称为“蚊针法”,即利用注射器将液态树脂单体注入另一种液体中,再通过紫外线固化形成波导。
通过“蚊针法”,团队一步就将聚合物芯层嵌入柔性硅橡胶薄片中,大大提高了波导结构设计的灵活性。他们还通过调整纤芯尺寸与光约束特性来控制传感器灵敏度。
在实验中,他们利用手指或测力计在传感器上施压并监测光输出。结果显示,该装置检测到与点击智能手机屏幕相当的指尖压力,灵敏度达到8.7—10.9dB/MPa。它还能检测到33毫秒内的光强度变化,在重复循环后仍性能良好。这些结果证实,该传感器在灵敏度、可靠性和重复性方面表现出色。
这项技术可以为机器人系统提供高精度触觉,确保人与机器之间更安全直观地协作。在医疗领域,该传感器还能集成到仿生假肢中,提供触觉反馈,实现更自然的抓握和操作。
 网友评论
网友评论