科技日报记者 李禾
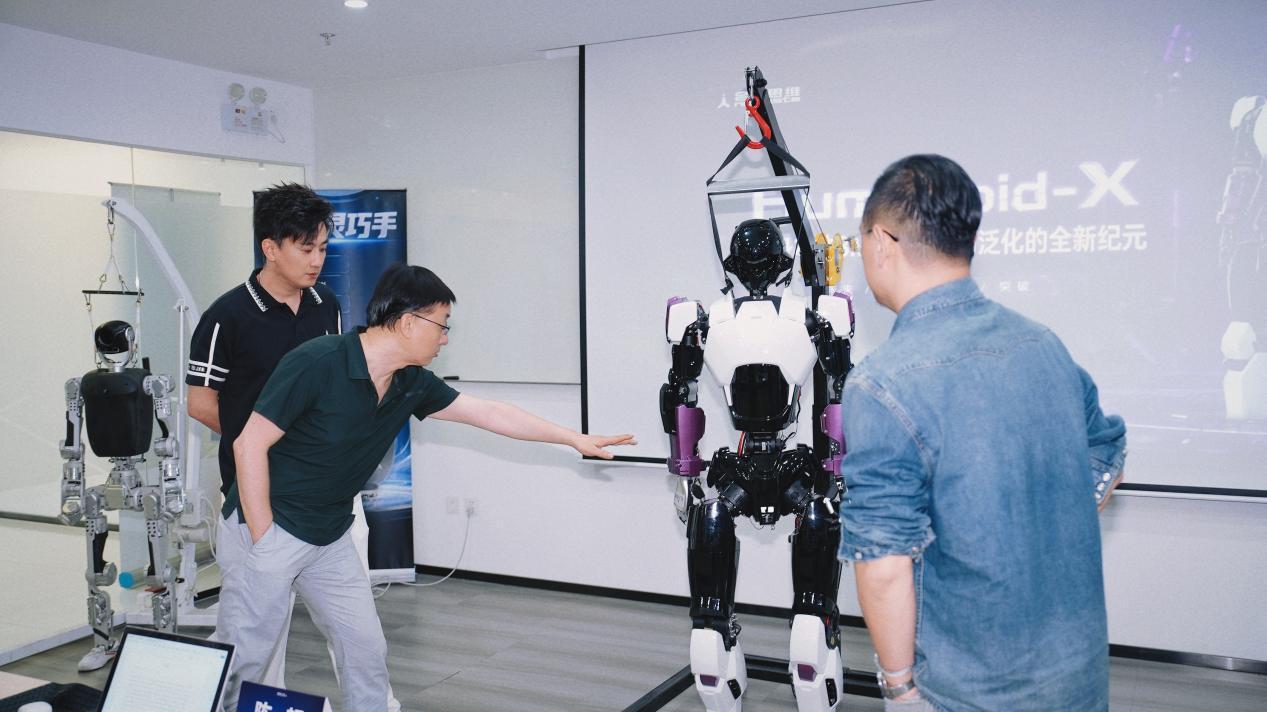
近日,合十思维在北京举办“Humanoid-X具身本体3.0”发布会,公布了全尺寸双足人形机器人Humanoid-X及其底层“物界OS双脑架构”。公司创始人赵普介绍了该架构在降低算力依赖、提升场景泛化能力方面的技术思路,推动具身智能技术在更多场景中落地应用。

当前,具身智能产业迈入从技术验证到规模化应用的窗口期。合十思维此次发布的“双脑架构”,试图从底层改变传统端到端的大模型路线,将仿脑感知与智脑逻辑结合,通过功能模块化分区、轻量化数学模型(总参数90亿)实现对物理世界的认知。赵普以“认识凳子”为例说明差异:“人通过少量经验即可举一反三,而大模型通常需要数十万样本。我们的方法是通过行为树(BTS)、脉冲神经网络(SNN)理解物体的功能与价值,而非单纯依赖统计拟合。”

Humanoid-X的另一特点是“语义控制”能力。机器人可识别如瓶子掉落声等自然音,并循声定位;同时,能将语义指令与物理动作直接关联,例如理解“拿”这一动词后,同一套算法可执行拿笔、拿水杯等不同任务,无需针对每个物体进行单独训练。赵普说,合十思维去年通过“物界OS通用具身”系统赋能机场导览机器人、公共区域清洁机器人等产品,实现商业化营收,产品落地新加坡樟宜机场、海淀区市政公园等场景。这些机器人可兼容其他工具,并具备任务优先级处理能力,例如清洁中遇到垃圾掉落,会先拾取垃圾再继续执行原有任务。
为进一步拓展垂直场景的落地,合十思维与数据智能服务商HCR慧辰股份达成战略合作,双方将结合慧辰股份的行业数据资产与算法积累,以及合十思维的类脑决策与人形机器人技术,共同推进物流、制造、家政、康养等行业的机器人应用。
(受访者供图)
 网友评论
网友评论