科技日报记者 罗云鹏
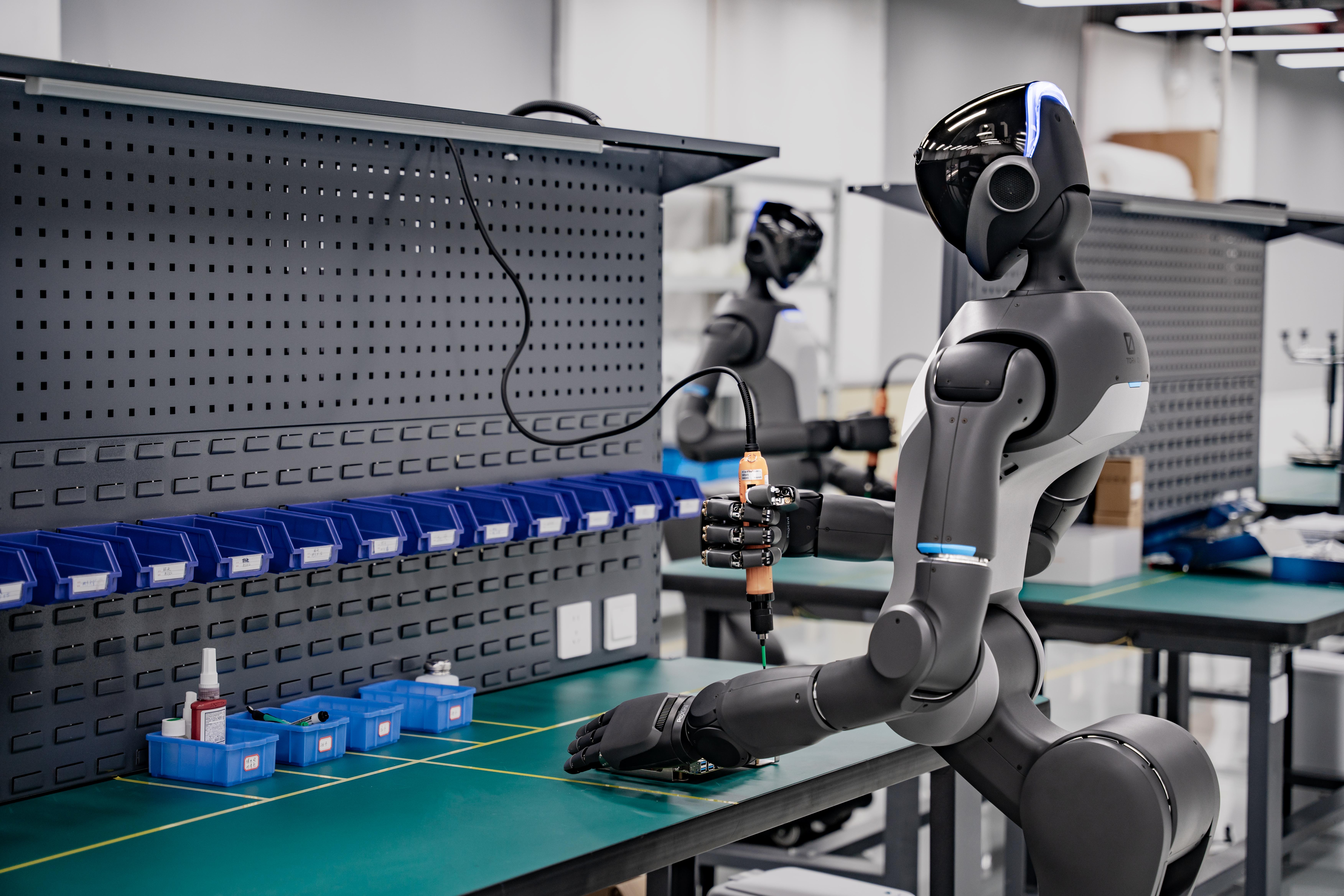
3月6日,记者从帕西尼感知科技(深圳)有限公司(以下简称帕西尼)获悉,基于触觉视觉多模态感知模型、仿生多指触觉灵巧手、机器人多模态数据采集、关节高精度定位与力控等技术,该企业具身智能机器人TORA-ONE已实现多项突破。
“触觉传感器”一直是困扰着机器人产业发展。据悉,该企业自主研发的ITPU高精度多维触觉传感器,通过高精度力反馈与材质识别能力,可实现抓取灯泡、操作精密器械等复杂任务。
如何让具身机器人在不同场景中实现环境自动判别?该企业将触觉视觉多模态感知模型与视触觉双模态模型的控制架构应用于TORA-ONE中,实现快速自主学习和适应不同环境,并完成多种场景下的自由灵活操作。

可灵活操作的类人仿生手是实现众多精细操作的关键。TORA-ONE所搭载的多维触觉仿生灵巧手已实现超高自由灵活度,可生成多维触觉响应,提高精细操控能力。
同时,其结合扩散模型驱动算法与高清AI手眼视觉系统,支持自适应抓握姿态调整,突破具身机器人“手-眼-脑”协同延迟瓶颈。
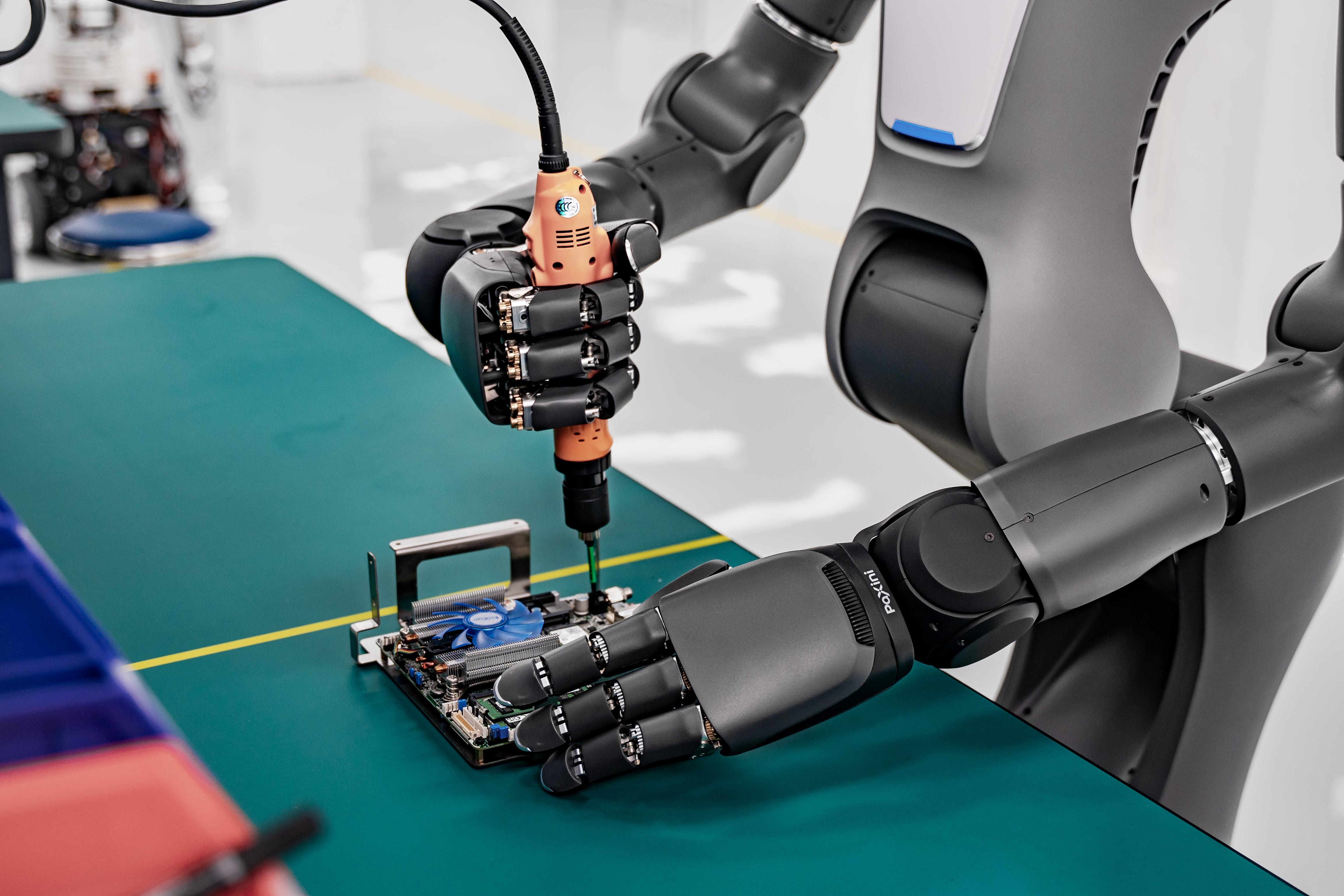
在仓储物流、精密装配等高复杂度场景中,TORA-ONE借助该企业研发设计的协作型机器人手臂,通过灵巧力控系统+仿生臂手协同架构,实现高精度、高速度的精巧抓取装配及高负载搬运操作。
此外,该企业还引入人体数据采集技术,通过视觉、力觉、触觉多模态传感器采集人体操作姿态、力度、运动轨迹等数据,并将其应用于TORA-ONE控制算法的优化,使其可在高负载场景下实现精准力控与协同,以适应不同重量和形状的物体与复杂任务处理。

日前,深圳市科技创新局发布《深圳市具身智能机器人技术创新与产业发展行动计划(2025-2027年)》,提出重点攻关人工智能与机器人融合技术、多模态感知、灵巧操作等核心技术。
(受访者供图)