科技日报记者 张梦然
一项结合计算机模拟与仿生机器人实验的新研究揭示,多种能在陆地“行走”的鱼类,尽管外形迥异,却共享一套简单而高效的运动法则。该发现以最关键的运动原理见解,破解了数亿年前早期脊椎动物如何从水域“上岸”的谜题,为揭示生命演化长河中这一革命性转变的初始条件,提供了新颖而有力的实证依据。相关研究成果2日发表于《自然·通讯》。
从水生到陆生,是脊椎动物演化史上的关键一跃。在现生鱼类中,如多鳍鱼、鲇鱼和肺鱼等,似乎仍保留着在陆地上“行走”的能力。长期以来,科学家观察到这些鱼类会采用一种结合身体波动与鳍支撑的移动方式。然而,由于这些观察多基于对单一物种的研究,学界难以确认是否存在一个超越物种差异的、统一的陆上运动机制。
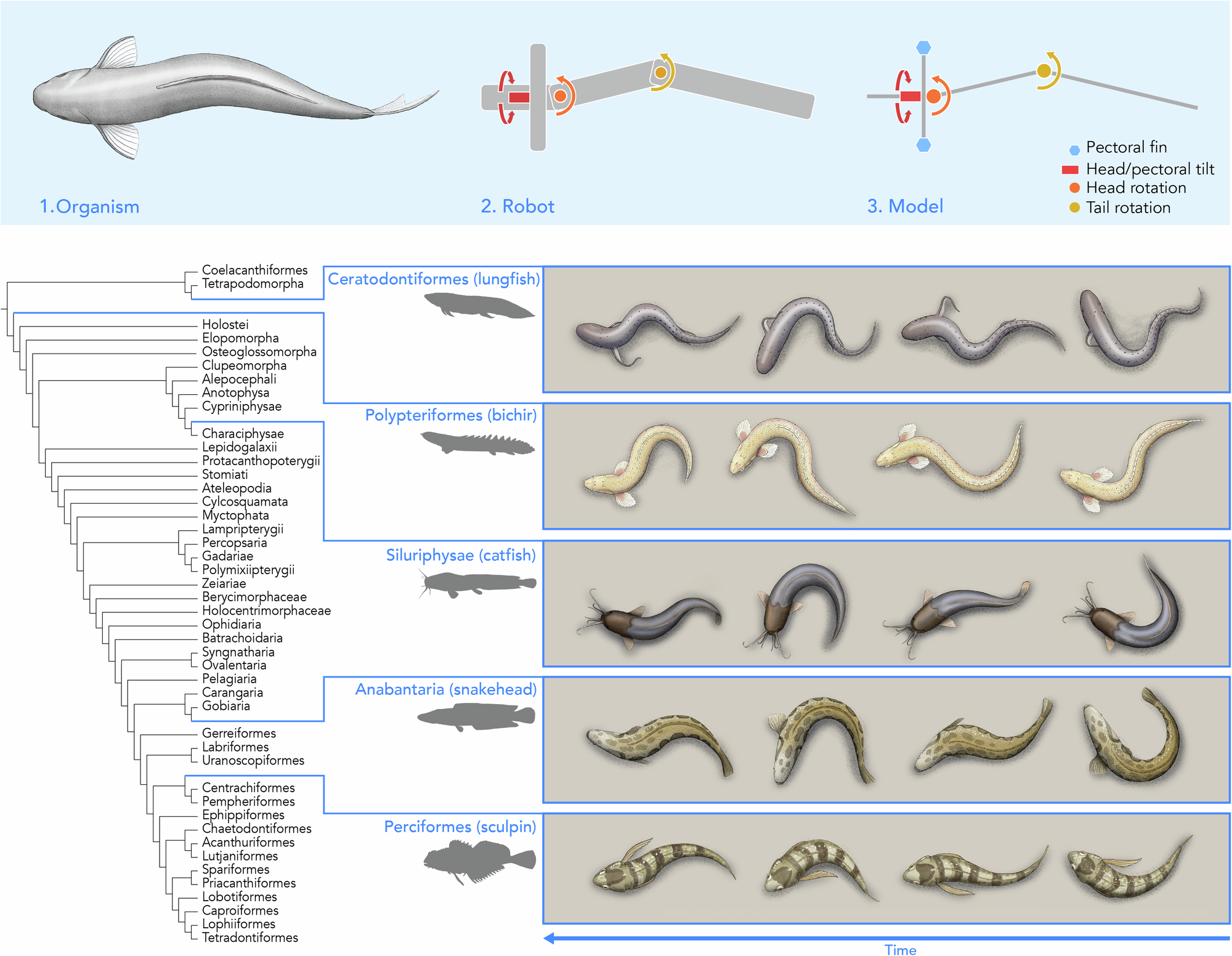
为解答这一问题,由英国剑桥大学领导的研究团队,选择以塞内加尔多鳍鱼等多种“会走路的鱼”为研究对象。他们首先基于真实动物的运动特征,建立了一个计算机模型。模拟结果显示,尽管这些鱼的体型和鳍的结构各不相同,但它们都遵循一个核心的运动原理:利用身体前部(如前鳍或头部)作为一个相对固定的“锚点”提供稳定性,随后通过尾部摆动产生推力,推动身体围绕这个锚点向前移动。研究者将这种步态称为“起伏式三脚步态”。
研究进一步指出,在模拟条件与塞内加尔多鳍鱼的实际情况高度匹配时,这种运动模式表现出最快的速度和最高的效率。为了验证计算模型的结论,团队还设计并制造了一个仿生机器人。无论是计算机模拟还是实体机器人实验,结果均表明,这种基于“锚定——摆动”原理的步态,在不同体型条件下都能有效工作,是一种强健的运动策略。
该研究的核心结论是,鱼类在陆地上实现有效移动,可能并不需要高度特化的四肢,而仅需协调简单的身体弯曲与适时的地面接触。这一发现具有重要的演化生物学意义。它表明,多种鱼类独立演化出在陆地“行走”的能力,可能并非源于遥远的共同祖先,而是因为它们都面临着相似的物理环境与机械约束,从而不约而同地找到了相似的解决方案,这属于趋同演化现象。
 网友评论
网友评论